
Q. 간단하게 자기소개 부탁드립니다!
안녕하세요. PLAIF의 AI Vision팀 개발자 알라오 헌낭입니다.

Q. PLAIF에 합류하시게 된 결정적인 계기는 무엇인가요?
전자공학과 전공자로서 대학 시절에 임베디드 시스템에 대한 흥미가 있었습니다.
무엇인가 코딩하며 실질적인 결과를 하드웨어의 움직임으로 볼 수 있다는 것이 매력적이었거든요.
인공지능의 필요성을 느껴 대학을 졸업하고 석사 과정에서 인공지능 영상처리를 연구했습니다.
PLAIF에서는 인공지능을 vision과 motion에 도입해서 제가 만든 vision 프로그램을 통해 로봇의 움직임으로 임베디드 시스템처럼 그 결과를 실질적으로 확인할 수 있는 환경에서 일할 수 있다는 기대감에 합류하게 됐습니다.
Q. 현재 어떤 일을 하고 계신가요?
Unseen piece picking이라는 프로젝트를 팀원들과 함께 진행하고 있습니다.
Piece picking은 vision에서 물체를 인식하고 그 물체를 집을 6D 포즈를 예측합니다.
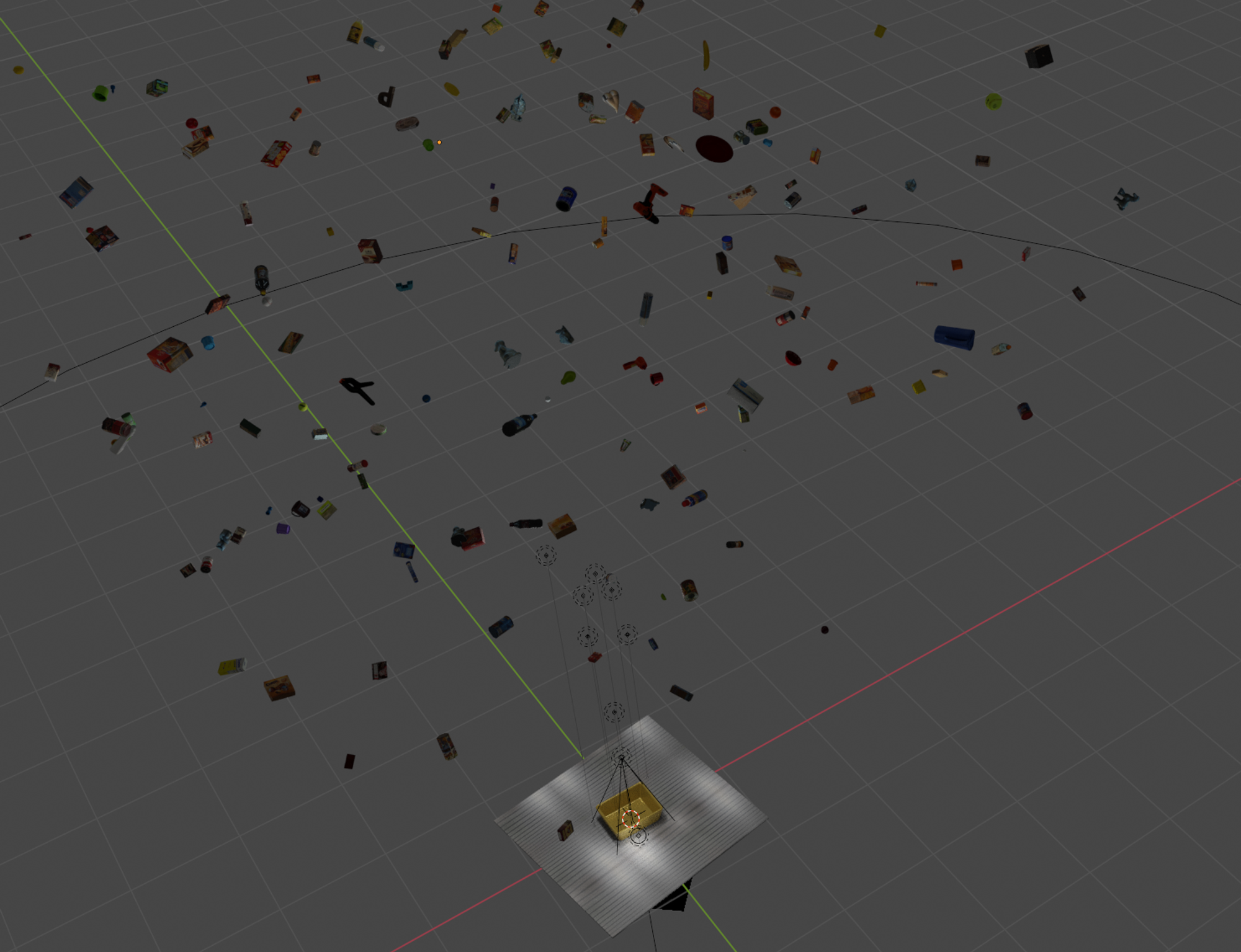
Unseen은 Vision AI 모델 학습에 활용되지 않은 데이터를 인식하는 것을 의미하는데,
복잡한 환경에서도 물체를 인식할 수 있도록 하기 위해 여러 상황이 고려된 알고리즘을 제작합니다.
예를 들어, 로봇이 가려진 물체를 집으면 생산라인에서 물체가 손상 입을 수 있기 때문에 안 가려진 것부터 잡아야 하는데, 이러한 복잡한 작업을 인공지능을 통해 해결하고 있습니다.
Q. 앞으로 PLAIF에서 이루고 싶은 목표는 무엇인가요?
일반 Computer vision과 달리 로봇 환경에서 사용되는 vision 알고리즘은 매우 복잡합니다.
3D vision이 도입되어야 되기 때문입니다. 저는 2D vision 관련 딥러닝 알고리즘을 연구했지만
3D vision을 통해 로봇 환경에서 필요한 딥러닝 알고리즘을 배우고 활용하는 것이 개인적 목표입니다.
또한 PLAIF의 목표인 생산 분야에 로봇이 투입되는 vision 알고리즘을 개선하고자 합니다.
속도가 빠르고 정확도가 높은 딥러닝 모델과 vision 프로그램을 만드는 것이 목표입니다.

Q. 마지막으로 헌낭님에게 PLAIF이란?
PLAIF의 약자대로 "Planning AI For"
인공지능을 활용하여 인간의 반복적인 일을 줄이고, 창의성을 살려주는 곳입니다.
생산 분야에서 범위를 넓혀 일상 속에서도 로봇과 사람이 동일한 환경에서 함께 도와주며
삶의 질을 높여주는 멋진 목표를 향해 달려가는 파트너입니다.

