
Q. 간단하게 자기소개 부탁드립니다!
안녕하세요.
메마른 피 와 차가운 심장을 가진
와 차가운 심장을 가진
와 차가운 심장을 가진플라잎 소프트웨어팀 윤군재입니다.

Q. PLAIF에 합류하시게 된 결정적인 계기는 무엇인가요?
저는 실시간 분산 통신 미들웨어 표준인 DDS(Data Distribution Service)에 대해서 10년 넘게 연구/개발을 진행했었습니다. DDS라는 통신 미들웨어가 주로 사용되는 분야가 국방/전력/로봇이라, 자연스럽게 ROS(Robot Operating System)에도 적용해 본 경험을 가지고 있어서 로봇 산업에 대한 관심도 갖고 있었습니다.
그러던 도중 PLAIF이라는 회사를 알게 되었습니다. PLAIF에서는 ROS를 사용하면서, Vision, Motion 관련 기술들을 개발하고, AI를 연구/개발/적용하고 있었습니다.
PLAIF에서 보유하고 있는 기술력은 우수하나, Linux 플랫폼, 통신 미들웨어, SW 제품화 관련 기술들에 보완이 필요하다고 느껴졌고, 이러한 부분들은 제가 장점을 가지고 있는 기술들이라, PLAIF에 합류하면 로봇 AI 솔루션을 만드는 데에 많은 기여를 할 수 있을 것 같아 합류를 결정하게 되었습니다.

Q. 현재 어떤 일을 하고 계신가요?
뭔가 한 단어로 표현하기 어려운데,
첫째로 운영체제 및 하드웨어와 소프트웨어 제품들에 대한 인증/설치/버전관리 등을 수행하고,
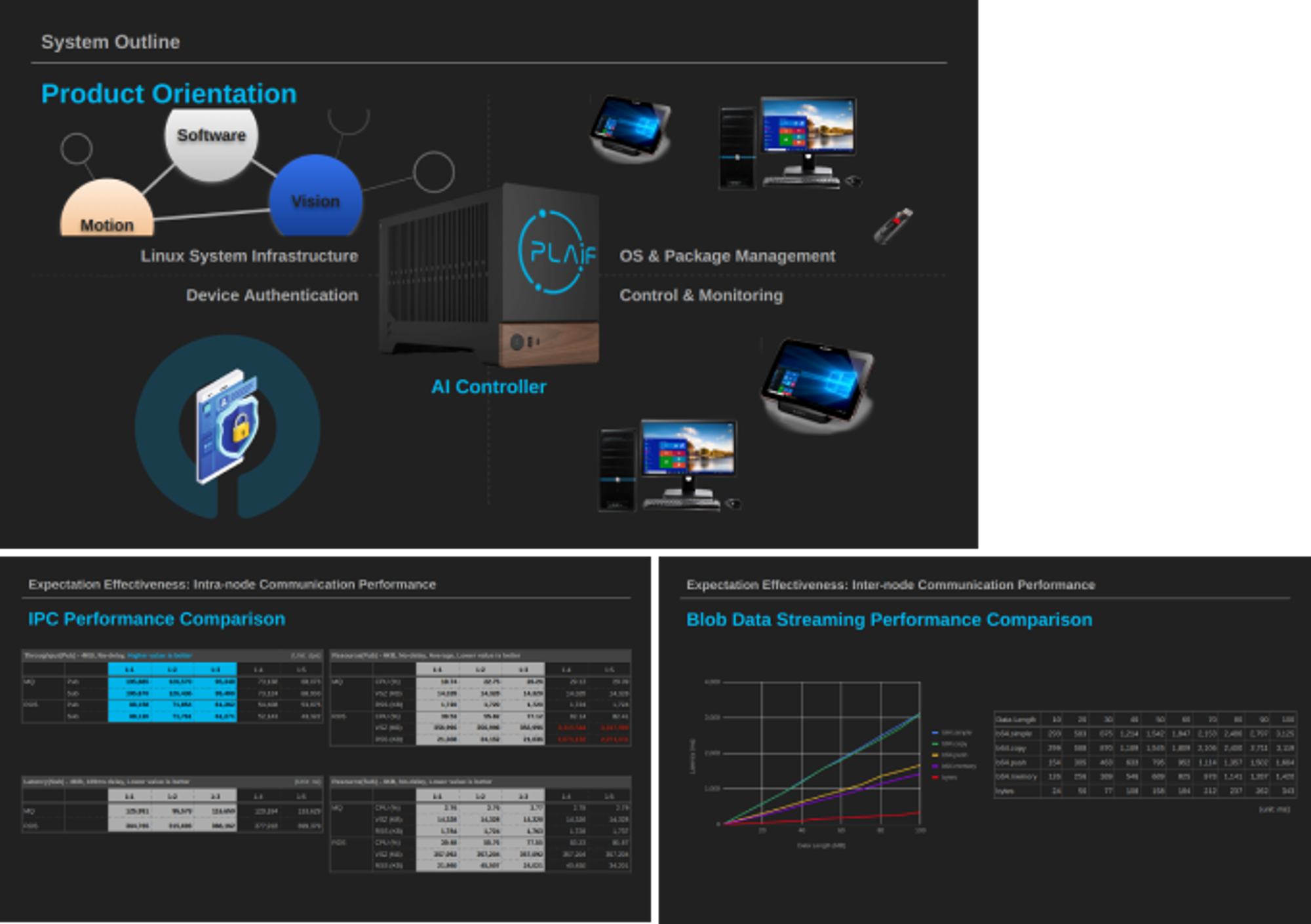
둘째로 AI Controller 내에 포함되는 AI Vision & Motion 모듈, 모바일 또는 Windows 기반의 GUI 응용프로그램 등을 서로 연동하고 상호작용할 수 있게 하기 위한 내/외부 통신 기술을 포함하는 Linux 기반 소프트웨어 플랫폼 및 제품화 관련 기술들을 개발하고 있습니다.
아아… 수행하는 업무 상, 겉으로 뭔가 보일만한 게 없다는 게 조금 아쉽네요…
AI Vision & Motion팀에서 개발하는 소프트웨어 모듈들이 효과적으로 동작할 수 있도록, 다양한 플랫폼 기술, 통신 프로토콜들과 알고리즘들의 특징과 성능을 비교/분석하여 기반 기술을 선정하고, 통신 인터페이스와 메시징 구조를 정의하여 최적화된 동작 환경을 제공하는 것을 목표로 노력하고 있습니다.
Q. 앞으로 PLAIF에서 이루고 싶은 목표는 무엇인가요?
로봇을 통해 저출산 고령화에도 무너지지 않는 나라를… 읍읍
기술적으로 달성하고 싶은 목표는 앞서 말씀드린 것 같이, AI Vision & Motion 소프트웨어에게 최적화된 동작 환경을 제공하는 플랫폼으로써의 기술을 완성시킴에 있습니다.
개인적으로는, 오즈의 마법사에서 도로시와 함께하는 모험을 통해 마음을 얻게 된 양철나무꾼과 같이, PLAIF에서 동료들과 서로 같은 목표를 향해 함께 노력하며 때로는 뜨겁게, 때로는 따듯하게 나눌 수 있는 마음을 얻어가고 싶습니다.


"Now I can love", said the tin man.
- The Wonderful Wizard of Oz, 1900.
Q. 마지막으로 군재님에게 PLAIF이란?

정해진 목표는 뚜렷하지만,
얼마나 세심하게 분해하고, 조립하고, 다듬고, 도색하느냐에 따라서 결과물의 퀄리티가 크게 좌우되기 때문에 조립하기 전부터 앞으로 만들어질 결과물에 대한 기대를 하게 되고, 만들어가는 과정에 대한 즐거움을 느끼게 하는
프라모델과 같다고 생각합니다.